装着型サイボーグHAL® とは
HAL® (Hybrid Assistive Limb®) は、身体機能を改善・補助・拡張・再生することができる、世界初※の装着型サイボーグ®です。
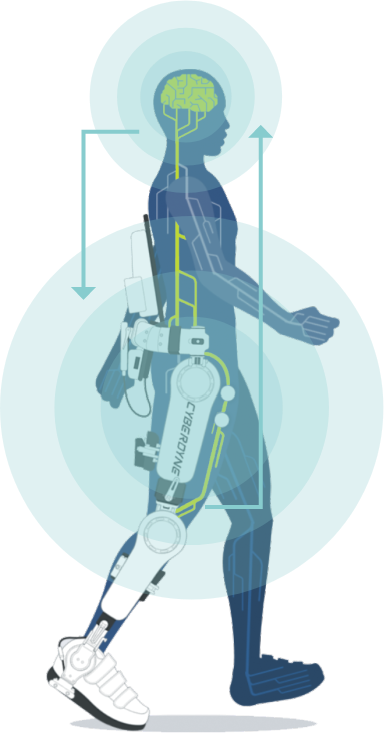
人が体を動かそうとすると、その運動意思に従って脳から神経を通じて筋肉に信号が伝わり、その際、微弱な「生体電位信号」が体表に漏れ出してきます。HALは、装着者の「生体電位信号」を皮膚に貼ったセンサーで検出し、意思に従った動作を実現します。
※ 2009年に全国発明表彰 21世紀発明賞受賞。「サイボーグ型ロボット技術の発明」、特許第4178186号
HALのしくみ
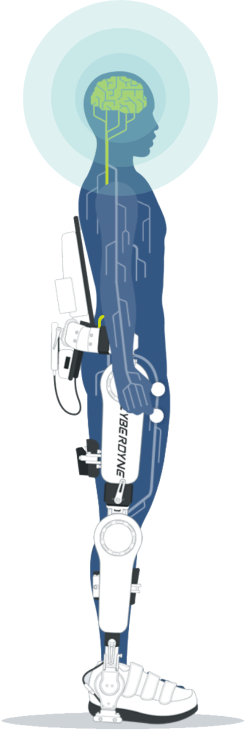
Step 1 –– Send 脳で信号が発生する
人が身体を動かすとき、まずは脳でその動作を考えることからはじまります。「歩きたい」と考えることで、脳は神経を通して必要な信号を、その動作に必要な筋肉へ送り出していくのです。
脳から各筋肉まで送り届けられる信号のスピードは 、約150〜400km/h。その速さは新幹線のスピードをはるかに超えています。その高速な信号を瞬時に理解することが、HALの技術にはかかせません。

Step 2 –– Receive 信号を受け取り、筋肉が動く
健常者の身体では、脳から送られた信号を、それぞれの筋肉が受け取ることで、考えた動作に合わせて必要なチカラの分だけ筋肉を動かすことができます。
「歩く」という複雑な身体の動きを実現するため、脳は全身から得られるさまざまな情報をもとに、いくつもの筋肉を常にコントロールしています。この原理に着目して開発されたのが、HALなのです。
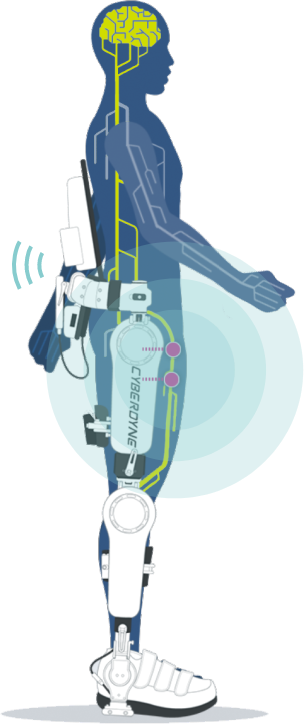
Step 3 –– Read 信号を、HALが検出する
脳から神経を通じて筋肉へ送られた信号は、非常に微弱な信号”生体電位信号”として、皮膚表面から漏れ出してきます。HALは独自に開発したセンサーを皮膚に貼り付けるだけで、その”生体電位信号”を読み取ることができます。その他、さまざまな情報を組み合わせて、装着者がどのような動作をしたいと考えているのかを、HALは認識しているのです。
皮膚から漏れ出る”生体電位信号”は非常に微弱な信号です。乾電池が生み出す電圧と比較すると、約1/1,000〜1/100,000。その弱い信号を読み取れるため、HALは関節が曲がらないほどの小さな動作も見逃しません。
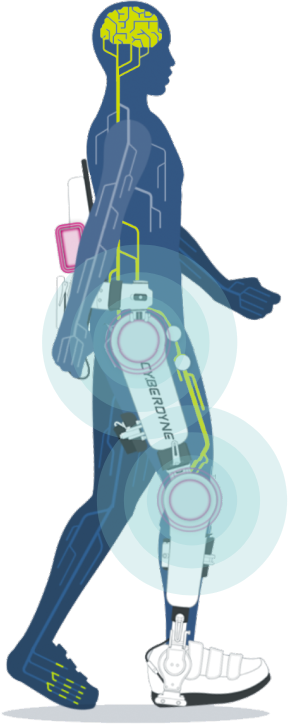
Step 4 –– Move 思いに従い、HALが動く
HALは認識した動作に合わせて、パワーユニットをコントロールします※。それによって装着者の意思に沿った動きをアシストしたり、普段より大きなチカラを出すことが可能になります。
※HALは“生体電位信号”を検出し、人の思いどおりに動作する「サイバニック随意制御システム」と、“生体電位信号”を検出できなくても、人のような動作を実現する「サイバニック自律制御システム」の2つを混在させることで、装着者の動作をアシストします。この技術こそが、HALのベースとなる先進テクノロジーなのです。
Step 5 –– Feedback 動作の情報がフィードバックされる
人の身体を動かすメカニズムは、筋肉を動かすだけにとどまりません。脳は実際に体が、どういう信号でどのように動作したか、確認を行います。HALを用いて“歩く”という動作を適切にアシストしたとき、”歩けた!” という感覚のフィードバックが脳へ送られます。
この独特なループにより、過剰な負担なく機能改善・機能再生を促進されていきます。これこそが、例えば足の不自由な方がHALなしでも歩くことができるための、「大事な一歩」につながっていくのです。
動作に対する正解を脳に教えてあげることのできる唯一の技術、それがHALなのです。
HALの活用分野
HALは、医療、ヘルスケア、介護作業支援、工場や建設現場などの重作業支援、災害現場での復興支援活動など、幅広い分野に向けて製品化されています。
HALの製品シリーズはこちら