Well-Being HAL® – Lower Limb Type
Cyborg-type robot fulfills wearer's will to stand and walk.
Well-Being HAL Lower Limb Type is a wearable robot designed for inducing the improvement of the physical function in the lower limb, for the wearer in chronic stages. Various upgrades were applied to this device, compared to its previous model, HAL for Well-Being Lower Limb Type.
*This product is only available in Japan
Features
Specifications
| Model |  HAL-FL08 |  HAL-FL07 | 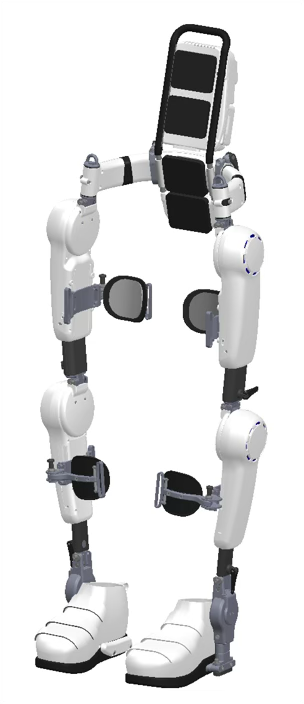 HAL-FL05 |
|---|---|---|---|
| Wearer Height Range*1 | 150–190 cm | 100–150 cm | S size : 150–165 cm M size : 160–175 cm L size : 170–190 cm X size : 180–200 cm |
| Wearer Weight Range | 40–100 kg | 15–50 kg | 40–100 kg |
| Upper Leg Length | 34–49 cm | 23–37 cm | S size : 36–38 cm M size : 38–41 cm L size : 40–45 cm X size : 43–48 cm |
| Lower Leg Length | 33–48 cm | 22–36 cm | S size : 35–38 cm M size : 37–41 cm L size : 39–45 cm X size : 42–48 cm |
| Hip Width | Middle: 27–37 cm Wide: 31–41 cm | 22–32 cm | M size : 28–36 cm W size : 32–40 cm |
| Range of Motion | Hip joint : Extension 20°/Flexion 120° Knee joint : Extension 5°/Flexion 120° | Hip joint : Extension 20°/Flexion 120° Knee joint : Extension 5°/Flexion 120° | Hip joint : Extension 20°/Flexion 120° Knee joint : Extension 6°/Flexion 120° |
| Shoe Size | 18–30 cm (1 cm increments) | 18–30 cm (1 cm increments) | 23–30 cm (1 cm increments) |
| Operating Time*2 | Approx. 1 hour | Approx. 1 hour | Approx. 1 hour |
| Power Source | Custom Battery | Custom Battery | Custom Battery |
| Overall Dimensions*3 | Height : 1,190 mm Width : 480 mm(Hip Width Middle) / 520 mm(Hip Width Wide) Depth : 440 mm*4 | Height : 930 mm Width : 400 mm Depth : 400 mm*4 | Height : 1,230 mm Width : 470 mm Depth : 430 mm*4 |
| Device Weight*5 | Double leg: Approx. 13 kg Single leg: Approx. 9 kg | Double leg : Approx. 9.5 kg Single leg: Approx. 6.5 kg | Double leg: Approx. 14 kg Single leg: Approx. 9 kg |
| *1 | This product can be worn as long as your body measurements such as upper leg length, lower leg length, and hip width are compatible. |
|---|---|
| *2 | May differ subject to operating environments and conditions |
| *3 | Dimensions at the minimum adjustment length. For the HAL-FL05, S-size dimensions apply. |
| *4 | Dimensions with 26 cm sensor shoes attached. |
| *5 | Includes cuffs, sensor shoes and batteries. |
| * | The product is designed for the wearer who requires support due to difficulties standing, sitting and walking. As the device uses bio-electrical signal to support the movement, if bio-elecrical signal cannot be detected, the device will not support the wearer with the intended movement. In this case, the wearer may not use the device. |
Related Products



Contact
CYBERDYNE does not rent the product to individual users.